摘要:本文简单、完整介绍一下状态机的定义及使用办法
状态机
1. 定义状态机、导入状态机的功能位置:

2.状态机的定义:
2.1 状态机模型树的要求:
定义前,模型树的结构类似定义机器人的树的结构,如图所示。
目前状态机只支持 一轴的结构,也就是说下面只可以挂: Base ,J1 两个节点。

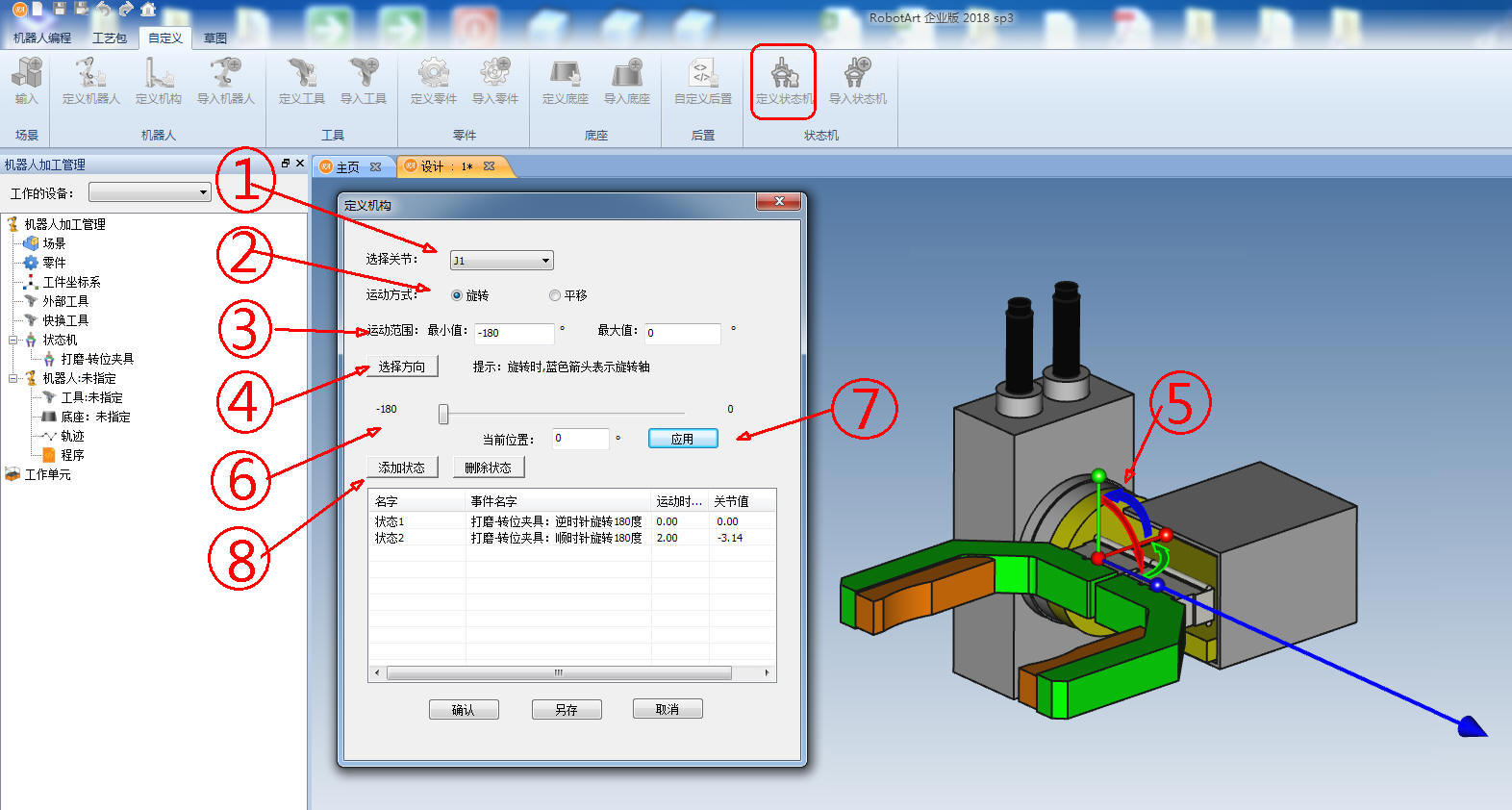
2.2 按照下图所示步骤1-8,来定义状态机 :
需要说明的点:
2.2.1 一般要选择J1关节为活动关节, 可以是“平移”、或者“旋转” 两种运动中的一种;
2.2.2 第4步启动后,第5步中的三维球就会激活,借助三维球的基本功能,确定好 J1 关节旋转或者移动的方向,且旋转轴必须和图示的蓝色轴重合;
接着结合第3步 和第6步 ,把 “关节活动的范围” 和“关节活动的正反方向”确定好后,就可以单击第7步的“应用”,把变位机活动范围确定下来。
其实到这里,状态机,其实已经是一个一轴的变位机了、或者一轴的滑轨了。
2.2.3 通过第8步,添加一些关键状态(可以是多个),将状态机固话为几个必要的动作
这步内一定要填好:
“事件名称” ----- 后续自定义事件调用其状态时,就是按 “事件名称” 进行调用;
“运动时间”----- 一定要填好状态的时间,默认一个状态为0 ,其他状态以它为参考,预估一下运动时间。
(如果不填,都为0 ,则实际场景中,调用这些状态时,状态机会做瞬间运动,从而不真实)![]()
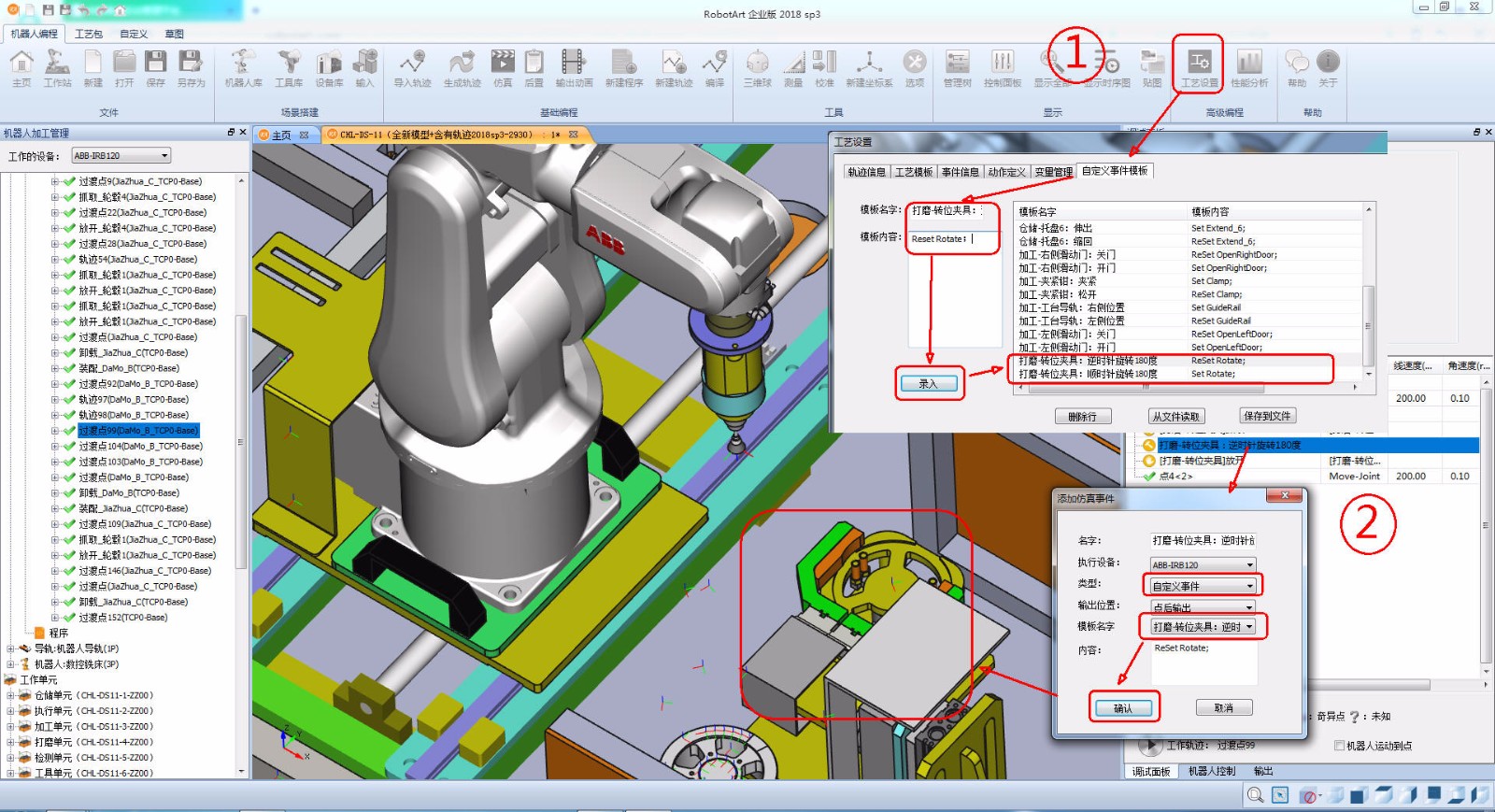
3.使用状态机
注意两点:
3.1 搭建含有状态机的场景后,一定要在确保左侧的"机器人加工管理面板”上的工作的设备 为 机器人时,
在【机器人编程】/【离线编程】/【工艺设置】面板内把 状态机 的所有状态对应的事件名称(请看上图),定义成自定义事件(模板),方便后续添加事件时调用。
3.2 再添加轨迹时,如果需要在某个轨迹点后或者点前,发出信号,促使状态机运动,只需要在该处添加自定义事件, 添加对应该状态机的相应事件即可。
![]()
注意:附件内有定义变位机所需的step文件;定义好的状态机文件 (*.robm);搭建好的使用该变位机的场景文件。大家可以下载学习一下。
关键字: 状态机的定义 状态机的使用



















 010-89755166转810
010-89755166转810


