 加载中
加载中
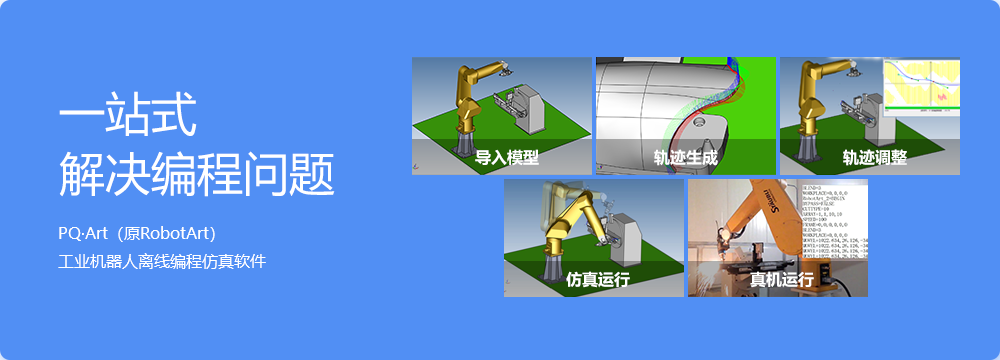
如果您正在做下面一件或几件事,那么您可能需要PQArt(原RobotArt)
给老板或用户呈报机器人工作站设计 机器人编程,尤其是采用示教编程方式比较复杂、困难 机器人选型 更换零件批号生产,但不愿长时间停工 正在调研离线编程软件,但询价后惊讶于高昂的软件售价 走进Art
 历经多年的技术积累与沉淀,凝练5大特点,6大核心技术
国内外10万多用户的选择
面向细分行业成熟的解决方案
完善的线上、线下服务网络,覆盖国内主要机器人高密度区
实时更新的在线使用手册、系统的在线视频课程,软件内嵌的问答服务,使得学习零障碍
了解更多
历经多年的技术积累与沉淀,凝练5大特点,6大核心技术
国内外10万多用户的选择
面向细分行业成熟的解决方案
完善的线上、线下服务网络,覆盖国内主要机器人高密度区
实时更新的在线使用手册、系统的在线视频课程,软件内嵌的问答服务,使得学习零障碍
了解更多

 试用软件
试用软件
 更多
更多

 27263
27263 3
3 37
37
 焕游仁阿生
焕游仁阿生



 山东山姆
山东山姆








 010-89755166转810
010-89755166转810


