摘要:主要讲解一下生成码垛轨迹后,发现大量码垛轨迹轴超限或者不可达的问题。
码垛轨迹轴超限
码垛轴超限问题:
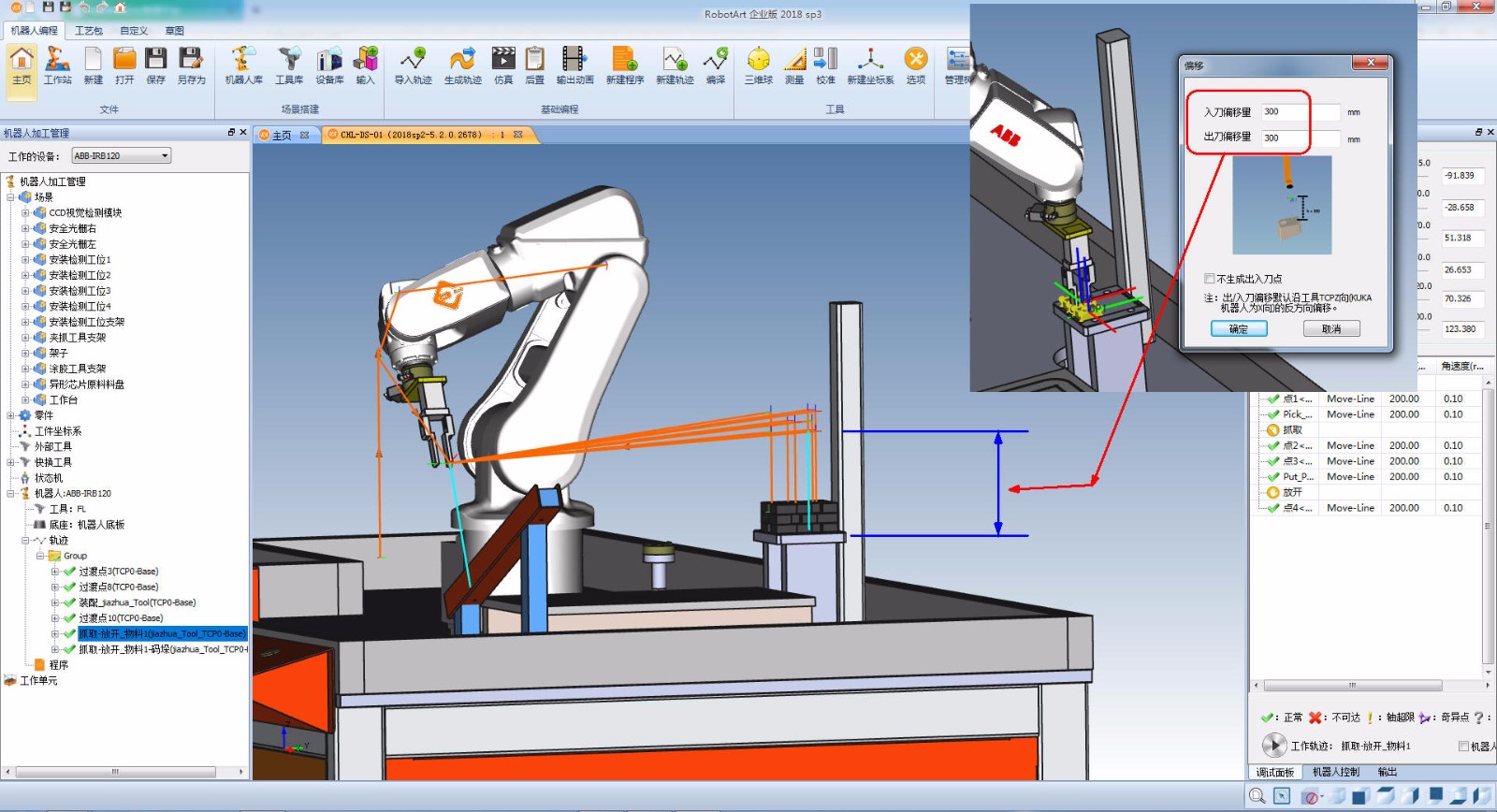
我们先从码垛生成的过程倒推分析。 码垛轨迹的创建,前体需要一个合并的含有抓取物块和放开物块的轨迹, 而抓取轨迹 、放开轨迹生成时,都会默认弹出一个 交互界面,需要设置 : 如刀偏移量 和 出刀偏移量 的值。默认的值都是300mm ,对于一个小机器人,比如ABB -IRB120 , 这个默认值一般不用修改。
但是,请看下图,码垛的轨迹是按码垛的层数,按物块的高度进行增高的,就是码垛的物料放置点越来越高,但是抬刀高度相对没变。 这就出现个问题,批量生成的码垛轨迹,避免不了有些放下物料后的抬刀点,就会出现机器人关节的轴超限。
加上一旦码垛出现轴超限,修改起来点太多,让人很恼火。这就是本质原因。
因此,今后码垛可以改为,抬刀高度随着码垛层数的增加,逐渐变短(这点当码垛总高度超过抬刀高度时,也有问题)
或者,创建放开物料的轨迹时,入刀和抬刀的偏移量尽量设置小一点,即可。
附件:大家可以用附件的模型添加一下放开轨迹,然后合并轨迹,进而生成码垛轨迹,感受一下。



















 010-89755166转810
010-89755166转810


