摘要: KUKA机器人的编程手册内规定工具加工方向(+X)和RobotArt内的(+Z)不一致,造成按KUKA手册试教出来的工具的TCP ,抄录到 RobotArt软件内的工具TCP设置界面后,真机运行时,机器人不受控制乱跑。 为了解决这个问题,RobotArt对在线的所有kuka机器人重新进行了定义,全部改为Z轴朝外,并对KUKA的后置格式全新进行了编写。改进后的RobotArt内的kuka机器人,后置支持输出line ptp cir (圆弧和整圆),也支持输出使用外部固定工具进行的打磨轨迹。RobotArt对KUKA机器人的支持,有个质的飞越。 这篇文章是结合这次KUKA相关改动后,通过真机多次尝试后,编撰的一套测试kuka机器人真机的法兰(包括快换)工具、外部工具(固定工具)的TCP的完整系统的测试办法。 希望对大家操控KUKA机器人有所帮助,有任务疑问,请随时联系(微信号:15810371630)
KUKA(库卡)机器人工具测量办法
(法兰工具、固定工具)
RobotArt离线编程软件要想和真机完美结合,保持动作一致,需要按整个离线编程软件使用流程的要求的一环要求,进行软件环境和真实环境之间进行校准操作。
(机器人)零点校准--》(工具)TCP校准--》(被加工)零件校准
因为KUKA的技术手册和RobotArt要求的有很大出入。因此,这篇文章只讲述RobotArt控制KUKA机器人时,工具TCP的校准办法。零点校准(即指:基坐标测量)和零件校准请看KUKA的相关技术文档即可,这里不做详细表述。
RobotArt内对机器人工具的TCP(tool center point)加工方向的定义和KUKA提供的编程手册所描述的有所不同(如下图所示):
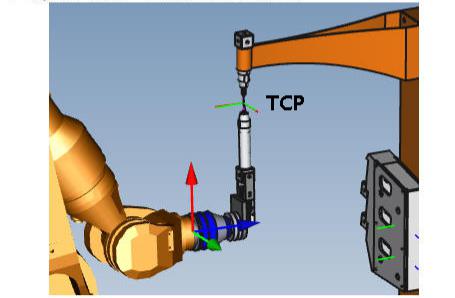
KUKA手册上要求工具的TCP姿态的X轴朝外为作业方向;
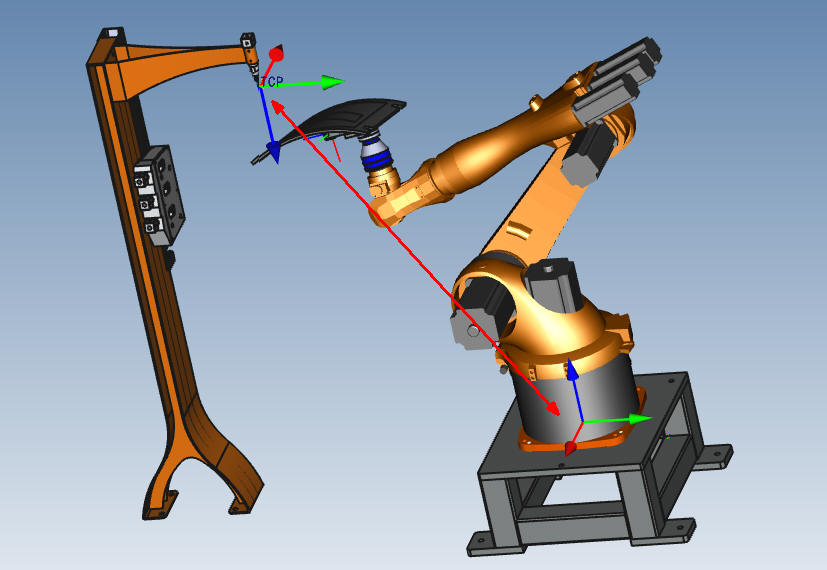
RobotArt要求TCP姿态的Z轴朝外为作业方向
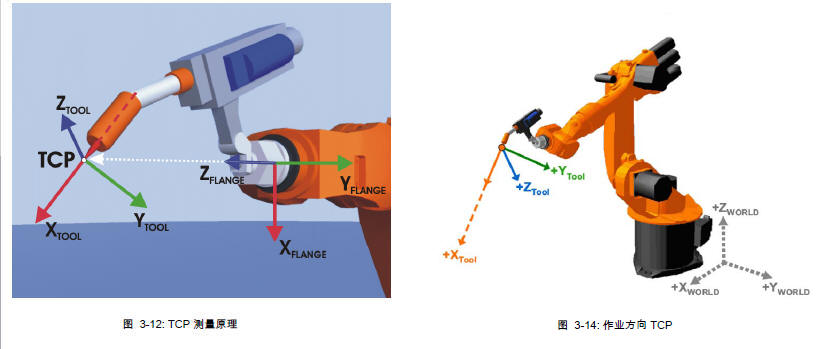
图示:KUKA对TCP的要求(X轴朝外为加工方向)
图示:RobotArt对TCP的要求(蓝色Z轴朝外为加工方向)
因此,如果使用RobotArt对含有KUKA机器人的工作场景进行编程时,事先要对真实机器人本体安装的工具TCP进行测量时(也叫TCP校准),不能完全按照KUKA编程手册内的描述去操作,否则就会出错。
讲前需要补充两点:
1.库卡(KUKA)机器人编程手册内虽然对工具TCP加工方向的轴及轴的朝向和RobotArt要求的不一致。但是: 里面描述的确定工具的TCP相对于机器人BASE坐标系的空间位置(XYZ)的讲述是正确;用于确定TCP空间姿态(ABC)的讲述也是正确的。
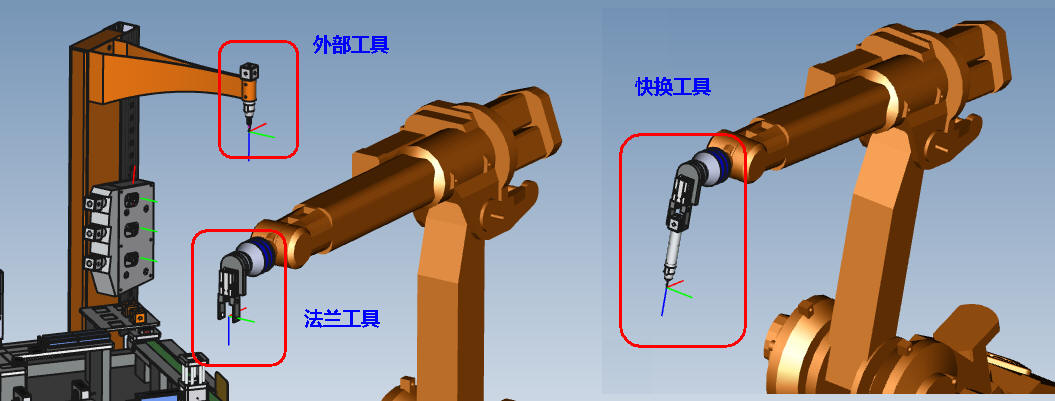
2.机器人的工具分三大类:法兰工具、快换工具、外部工具。 前两者的测量办法基本一致,外部工具是另一类的,下面会分别介绍。
下面结合RobotArt软件工作站内的CHL-JC-01工作站的校准过程,给大家讲解一下KUKA机器人的法兰工具的测量办法。
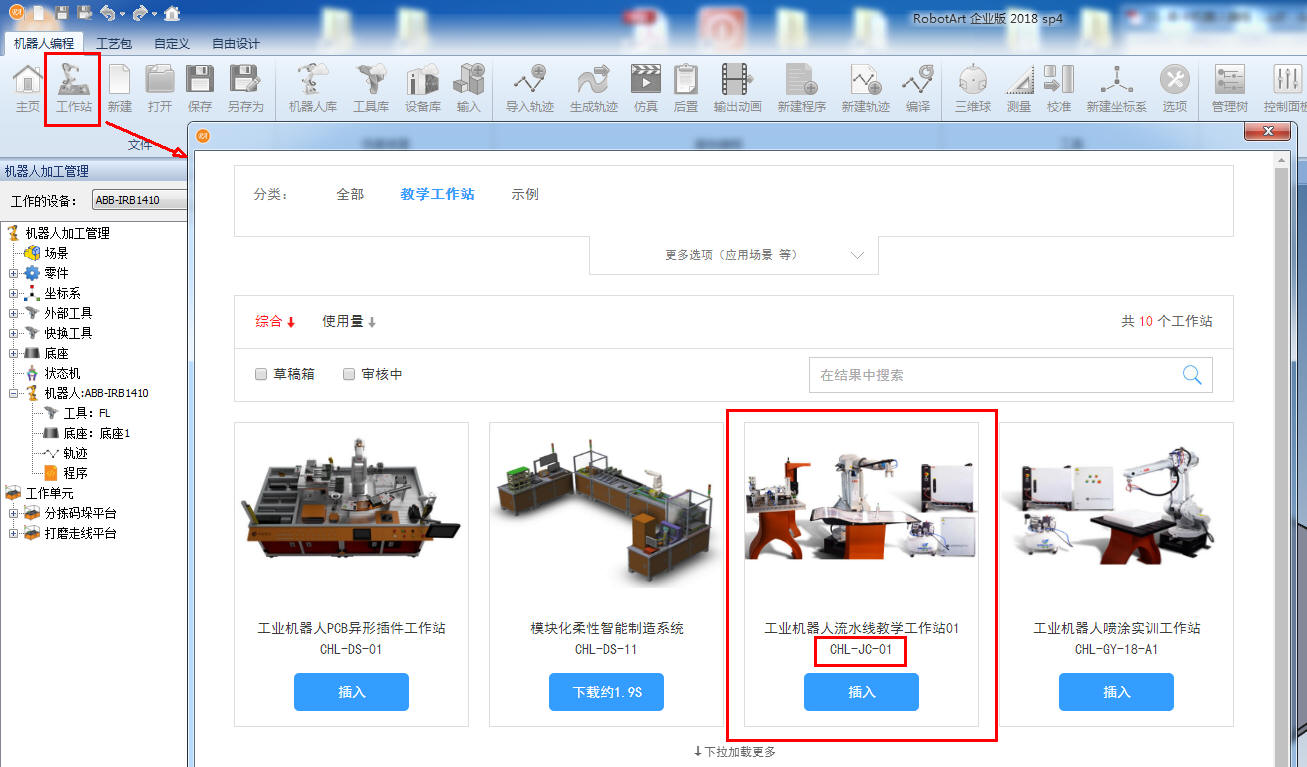
图示:CHL-JC-01工作站加载位置
1.法兰工具测量
1.1 法兰工具测量的途径 (仅仅讲一下标红的办法)
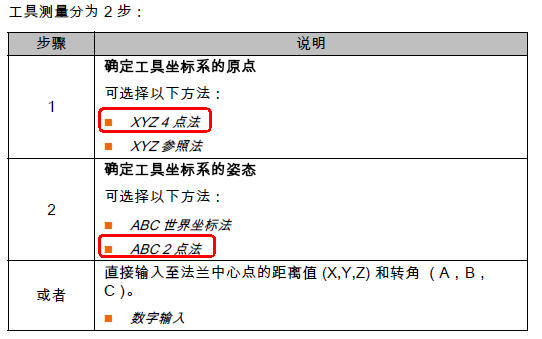
1.2 TCP测量的XYZ 4点法
将待测量工具的TCP 从4个不同方向移向一个参照点。参照点可以任意选择。机器人控制系统从不同的法兰位置值中计算出TCP。
试教法兰工具的TCP时,不借助 顶针,而选择桌子的边角,是因为KUKA机器人无论法兰工具、快换工具或外部工具(固定工具)的TCP校准,不仅仅是简单试教多个点,后面还的用 ABC 2点法去试教TCP姿态。后面试教姿态时,如果周边没有含有边线的模型作为参考,移动或者摆设机器人末端的法兰姿态时会很困难。

XYZ 4点法的操作步骤:(库卡示教器操作)
1. 选择菜单序列 投入运行 > 测量 > 工具 > XYZ 4点。
2. 为待测量的工具在给定一个号码和一个名称。 用 继续键 确认。
(这个法兰工具的编号需要记住,后面校准外部工具时,需要手工输入这个编号)
3. 用TCP移至仍以一个参照点。按下软键 测量 ,对话框“是否应用当前位置?继续测量” 用 是 加以确认。
4. 用TCP从一个其他方向朝参照点移动。重新按下测量 ,用 是 回答对话框确认。

5. 把第4步重复两次。(最后一次不一定按图中那样让工具TCP垂直朝下。)
6. 负载数据输入窗口自动打开。 正确输入负载数据,然候按下 继续 键。
7. 包含测得的TCP X Y Z值的窗口自动打开,测量精度可在误差项中读取。数据可通过 保存 直接保存。
1.3 姿态测量的 ABC 2点法
通过趋近X轴上一个点和XY平面上一个点的方法,机器人控制系统即可得知工具坐标系的各轴。
当轴方向必须特别精确地确定时, 将使用此方法。
图示:姿态测量的 ABC 2点法(真机运动情况)
特别说明:
1.姿态测量遵循坐标系的“右手定则”。
2.确定真实环境下机器人工具的TCP坐标系的朝向时,尽量和软件内定义好的工具TCP朝向一致。这样后续校准时,工具TCP的姿态变动很小,即使事先RobotArt内做好的轨迹也不会受到太大影响(校准前后TCP朝向变化太大,很多事先做好的轨迹会大量变坏)。
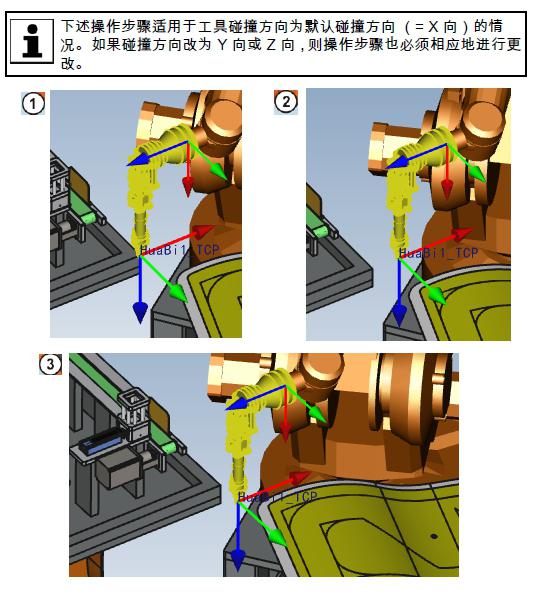
3.确定X 或Y轴正向的原则是:首先,选择“工具”为当前坐标系;然后,按照示教器上“ABC二点法”的提示,结合上图中机器人法兰末端坐标系和当前要测试的工具TCP的朝向关系:
3.1向机器人法兰工具的 -Z 方向移动一点距离,来确定工具TCP的X轴正向;
3.2向机器人法兰工具的 +Y 方向移动一点距离,来确定工具TCP的Y轴正向;
(本质就是:机器人工具TCP实际运动的方向就是X 或Y轴的正向方向)

1.4 TCP校准
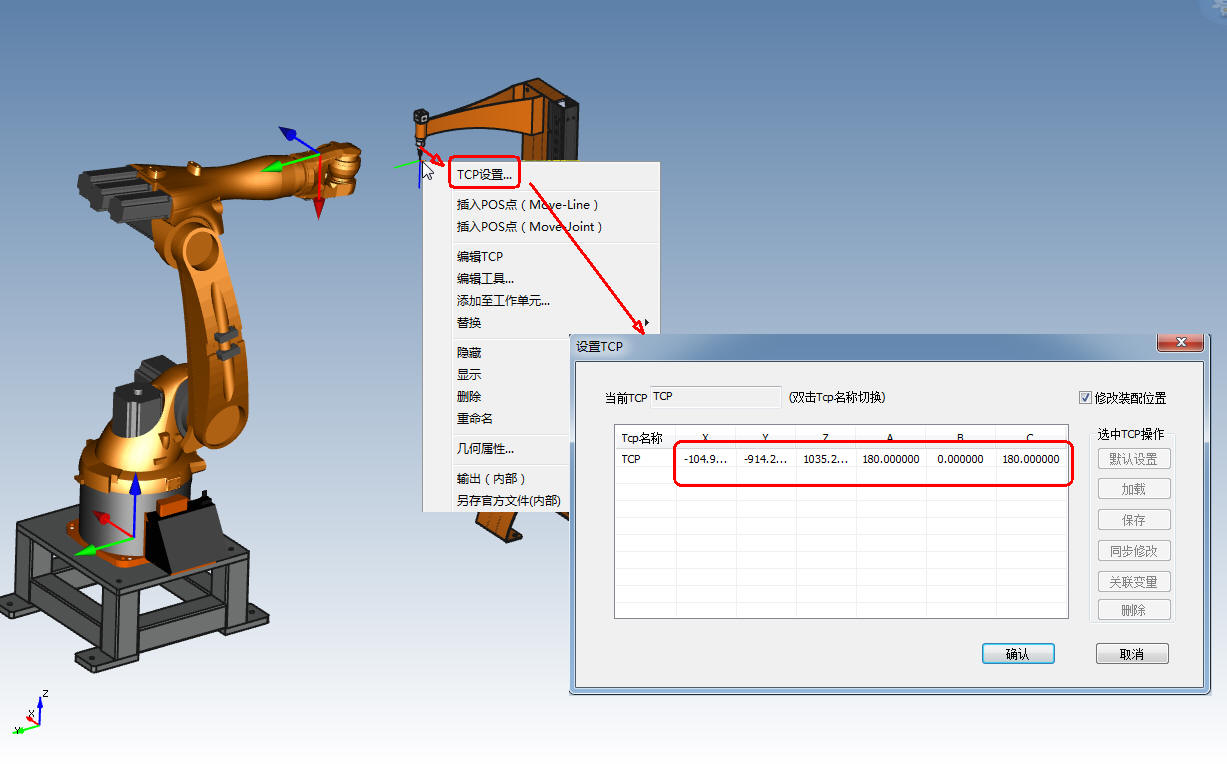
从示教器上,将上面校准完成的TCP的值,抄录或拍照下来。然后按下图输入到机器人的法兰工具的 TCP设置 界面内:
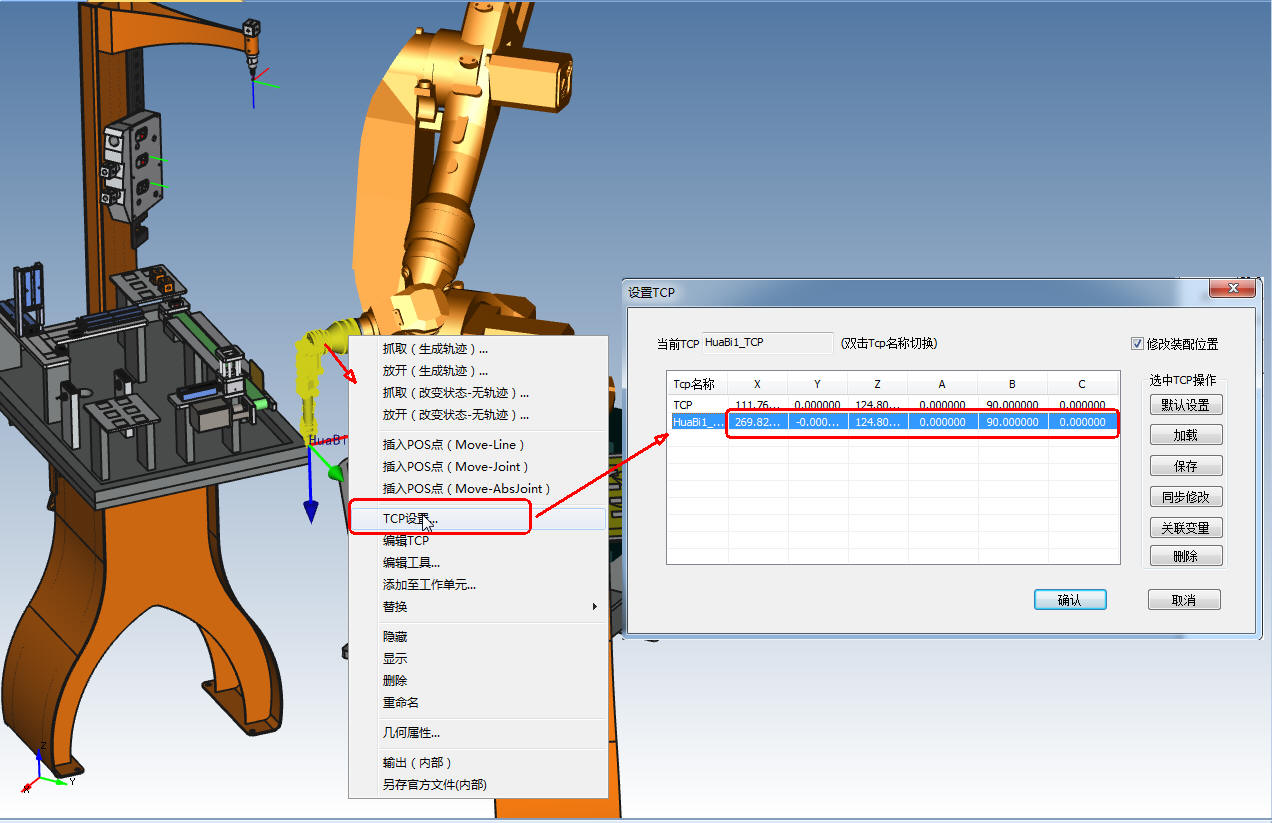
特别说明:
1.RobotArt内只有法兰工具、外部工具的右键菜单内有“TCP设置”,快换工具没有;
2.RobotArt内法兰工具一旦安装了快换工具,则快换工具的TCP会被复制到法兰工具内;
3.抄录试教器内试教的法兰/快换工具的值,移动要看清楚,不要抄错位置。
2.固定工具测量
2.1 概述
固定工工具的测量分为2步:
2.1.1 确定固定工具的外部TCP和世界坐标系原点之间的距离;
2.1.2 确定外部TCP,确定该坐标系的姿态。
图示:机器人Base坐标系和固定工具的关系
特别说明:
固定工具(外部工具)的TCP,是以群局坐标系World(或者机器人Roboroot也就是Base坐标系,因base和world默认重合)为基准管理外部TCP,即固定工具(外部工具)等同于基坐标。
2.2 测量说明 (重点关注6D的测量办法)
2.2.1 确定TCP时需要一个由机器人引导的已测工具。(前面试教好的工具即可)
2.2.2 确定姿态时要将法兰的坐标系校准 至平行与固定工的坐标系。
图示: 法兰工具移至外部工具
有两种方法:
l 5D : 只将法兰工具的朝向(+X轴方向)与 固定工具 +Z轴方向 水平且T同向。其他轴的姿态将由系统确定,对用户来说,不是很容易地就能识别。
l 6D : 所有3个轴的姿态都将告知机器人控制系统。
图示:对坐标系进行平行校准(隐藏了法兰工具)
2.3 操作步骤 (示教器手工操作)
2.3.1 在主菜单中选择:投入运行>测量>固定工具>工具。
2.3.2 为固定工具指定一个号码和一个名称。用 继续键 确认。
2.3.3 输入所用参考工具的编号(选已校好的法兰工具名字)。用 继续键 确认。
(因为它要记录到坐标系列表内,因此起编号最好靠后,比如从11开始)
2.3.4 在5D/6D 栏中选择一种规格。用 继续键 确认。
2.3.5 用 已测量的工具 的TCP移动至固定工的TCP。点击测量,并用是确认位置。2.3.6 请看上面的图片(图示:对坐标系进行平行校准)
如果选择 5D:
不推荐,按照库卡机器人编程手册介绍的办法无法确定出Z轴方向。
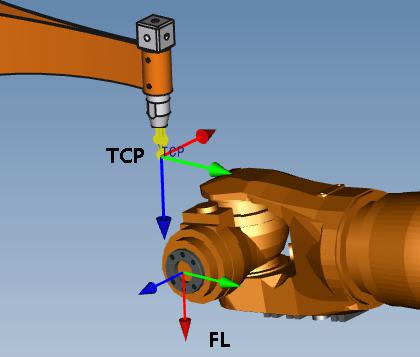
如果选择 6D:
应对机器人末端法兰进行调整,使它的各轴平行于固定工具的各轴:
FL的 +X 平行且同向于外部工具的 TCP的 +Z
FL的 +Y 平行且同向于外部工具的 TCP的 +Y
FL的 +Z 平行且反向于外部工具的 TCP的 +X
2.3.7 点击 测量 。用 是 确认位置。
2.3.8 按下 保存键 。
2.4 TCP校准
从示教器上,将上面校准完成的外部工具的TCP的值(该值在坐标系列表内),抄录或拍照下来。然后按下图输入到外部工具的TCP设置界面内:
特别说明:
1.RobotArt内只有法兰工具、外部工具的右键菜单内有“TCP设置”,快换工具没有;
2.RobotArt内法兰工具一旦安装了快换工具,则快换工具TCP会被复制到法兰工具内;
3.抄录试教器内试教的法兰/快换工具的值,移动要看清楚,不要抄错位置。
2.5 校准工件
在KUKA(库卡)的机器人编程手册中,后面会强调还要校准工件。 RobotArt对这块进行了特殊处理,因此不需要再进行校准。
后记:
按照校准的流程,后续还需要借助校准好的法兰工具(最好是一个顶尖型法兰工具),对零件进行工件校准。如何校准顶尖型法兰工具(请看前面内容)和 零件校准,不再详述。



















 010-89755166转810
010-89755166转810


